平台搭载激光雷达、深度相机、惯导、里程计等传感器,可实现SLAM建图导航、视觉SLAM、图像识别等功能。

定制化操作系统AutolaborOS系统,已实现室内自主导航,无须开发一键式建图导航,操作简单。
系统持续更新,代码全部开源,使用户可以快速上手ROS,基于平台高效的进行二次开发。

传感器及设备清单
| 序号 | 设备 | 型号 |
|---|---|---|
| 1 | 激光雷达 | 思岚 RPLIDAR-A2 |
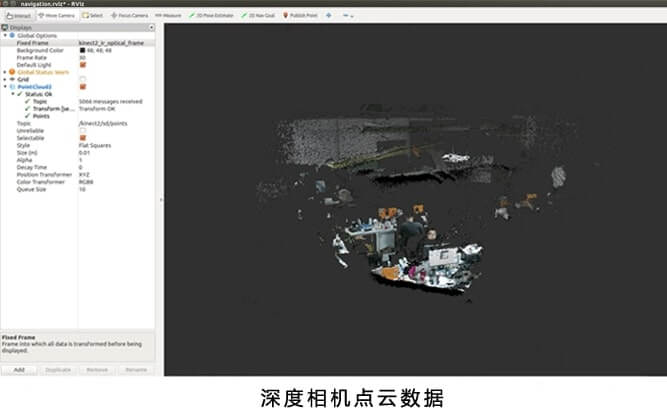
| 2 | 深度相机 | Kinect V2 |
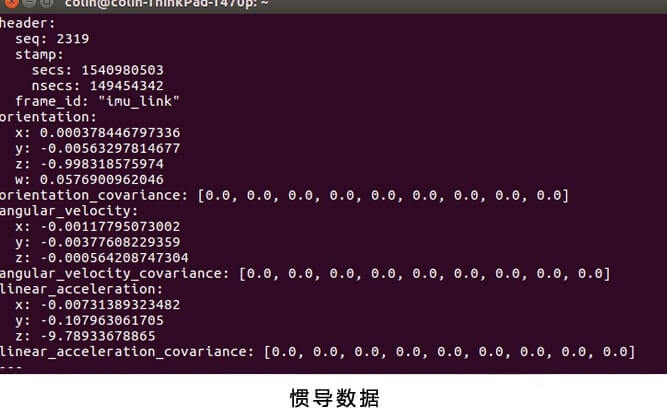
| 3 | IMU | AH-100B |
| 4 | mini 电脑 | AMD Ryzen 3 2200G/4G/120G |
| 5 | 13.3 寸高清显示屏 | 1080P 便携 HDR 显示器 |
| 6 | 电源模块 | 24V 10AH 锂电池/稳压模块/电量显示模块/分线板船型电源 |
功能及效果演示

驱动列表:
- Autolabor Pro1 驱动包
- 激光雷达驱动包
- RPLIDAR A1
- RPLIDAR A2
- HOKUYO URG-04LX-UG01
- 深度相机驱动包
- Kinect V2
- 惯导驱动包
- AH100B
功能列表:
- 一键SLAM导航
- 键盘控制机器人运动
- 手柄控制机器人运动
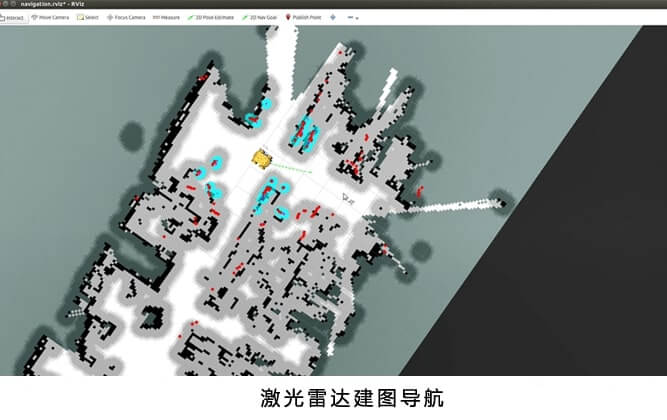
- Gmapping 单线激光雷达SLAM建图
- Amcl 基于单线激光雷达定位
- Navigation 自动导航功能
- Autolabor Simulation 仿真模拟器场景应用
应用场景:
- ROS学习
- 算法验证
- 自动驾驶
- 自主导航
- 智能建图
平台可实现的功能包括但不仅限于以上内容,更多功能还在持续开发中,后续功能将通过AutolaborOS更新发布,敬请关注。
微信:13269702514